Sensors, Free Full-Text
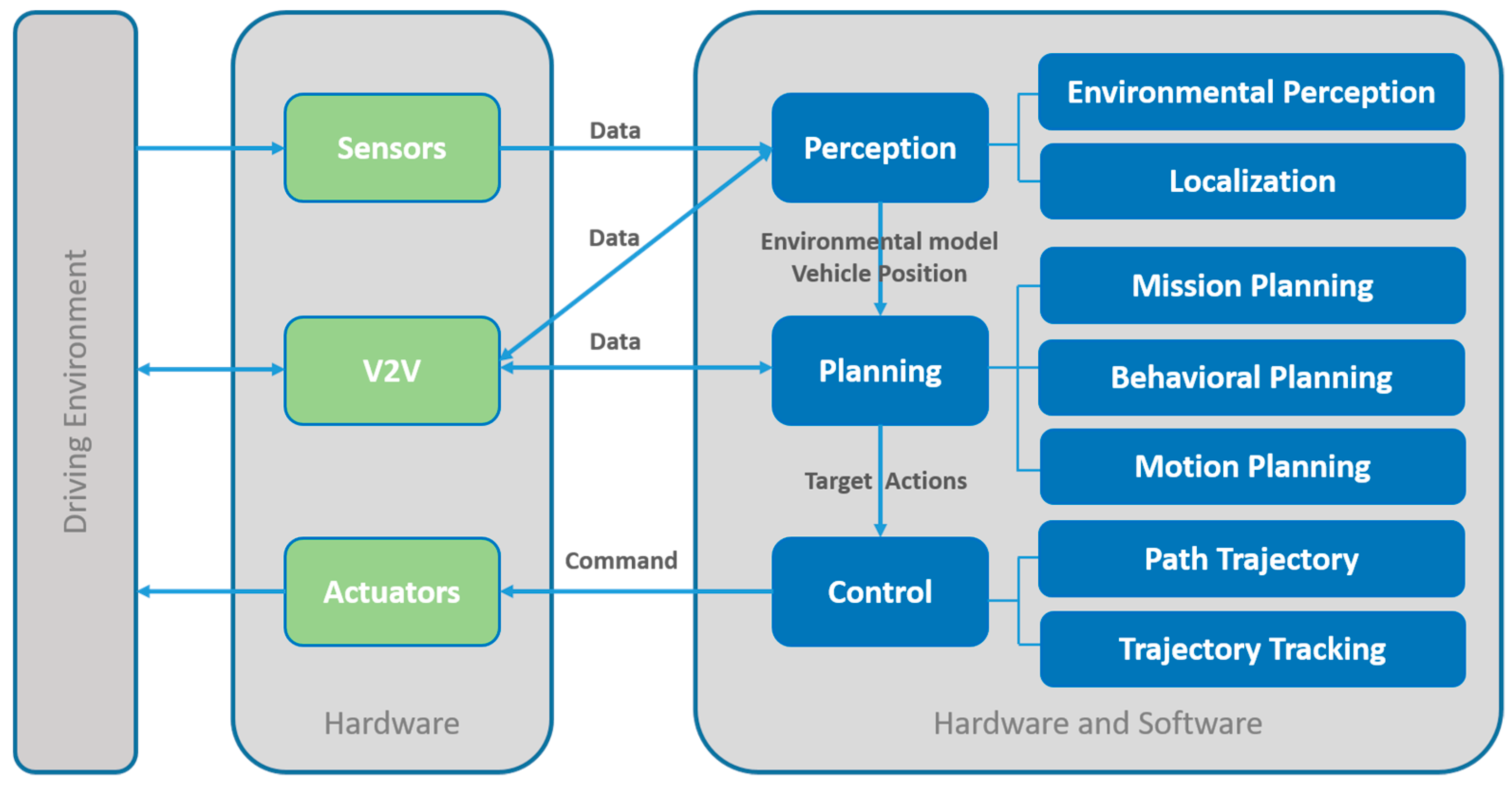
This paper presents a systematic review of the perception systems and simulators for autonomous vehicles (AV). This work has been divided into three parts. In the first part, perception systems are categorized as environment perception systems and positioning estimation systems. The paper presents the physical fundamentals, principle functioning, and electromagnetic spectrum used to operate the most common sensors used in perception systems (ultrasonic, RADAR, LiDAR, cameras, IMU, GNSS, RTK, etc.). Furthermore, their strengths and weaknesses are shown, and the quantification of their features using spider charts will allow proper selection of different sensors depending on 11 features. In the second part, the main elements to be taken into account in the simulation of a perception system of an AV are presented. For this purpose, the paper describes simulators for model-based development, the main game engines that can be used for simulation, simulators from the robotics field, and lastly simulators used specifically for AV. Finally, the current state of regulations that are being applied in different countries around the world on issues concerning the implementation of autonomous vehicles is presented.

Food Frontiers - Wiley Online Library
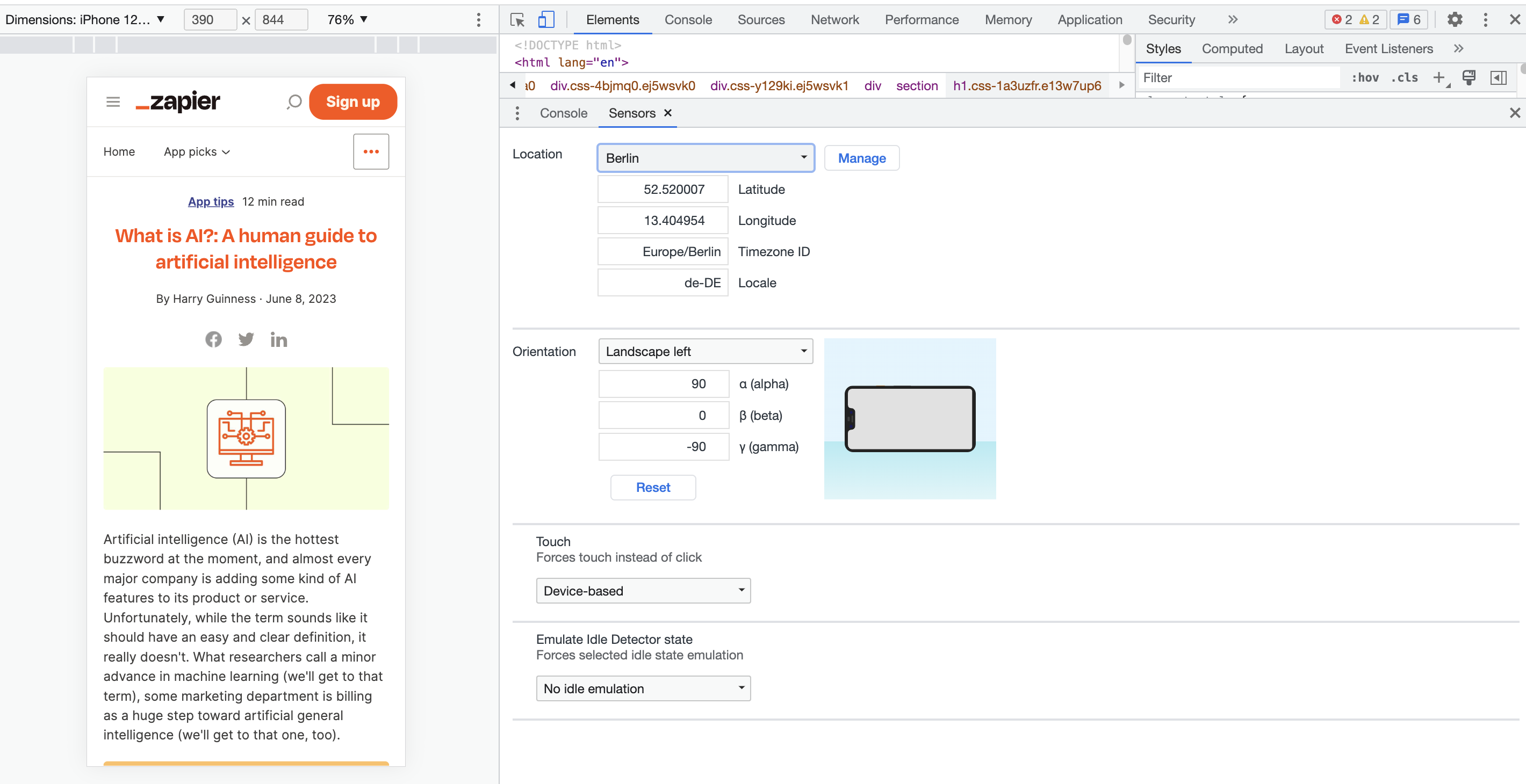
How to use Inspect Element in Chrome, Safari, and Firefox
Sensors, Free Full-Text
PAPER SENSOR|PRODUCTS|KODENSHI CORP.

IMS Solution Zone Water Detection Sensor
Sensors, Free Full-Text

Questions and Answers: GE CYNC Smart Wire-Free Motion Sensor White
.png)
Free AI Content Detector for GPT-4, ChatGPT & Other Tools
Home - IEEE Sensors Letters

Sensors, Free Full-Text, anisotropic bilinear trilinear

Bambu Lab A1 mini, Desktop 3D Printer
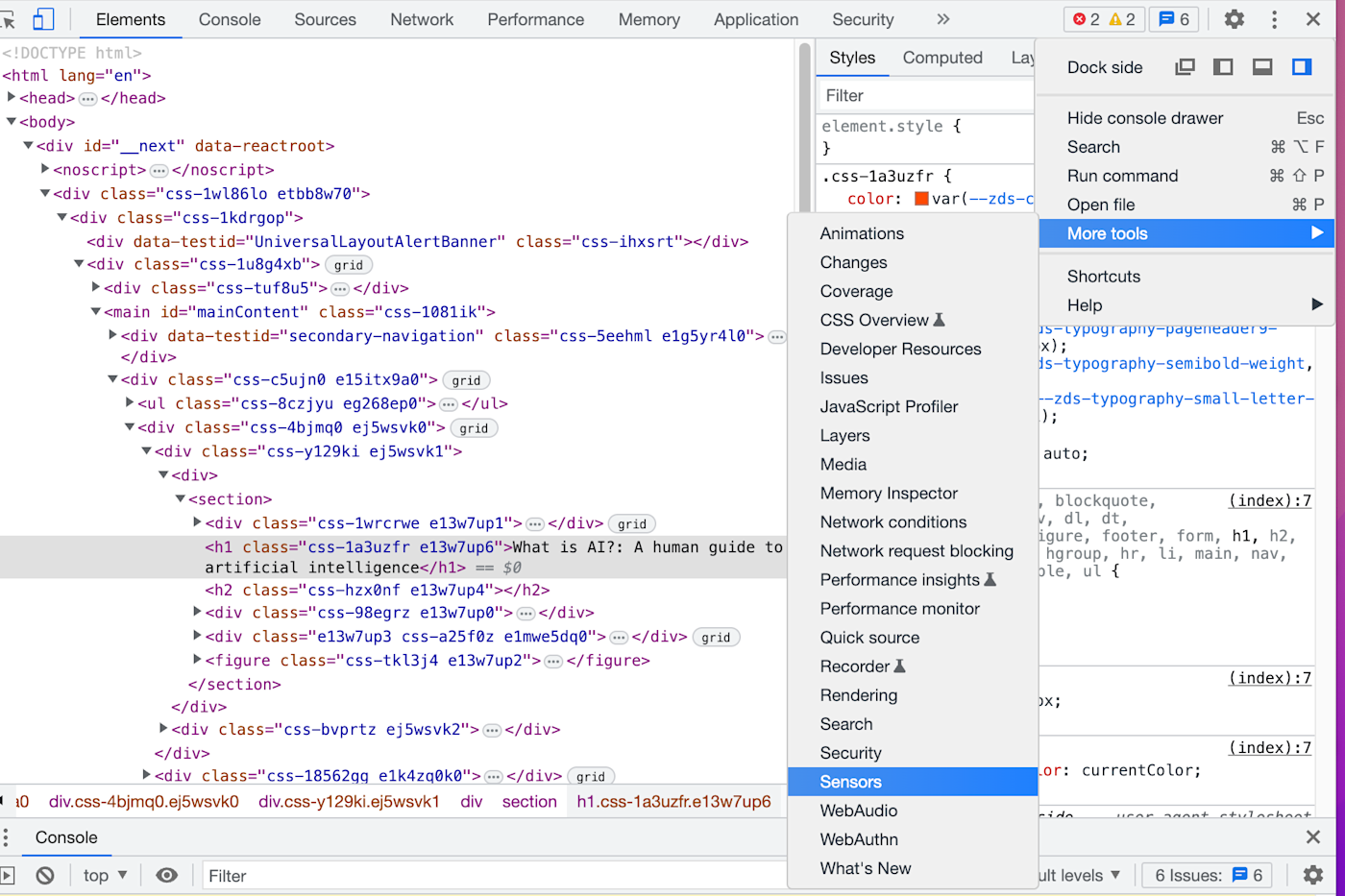
How to use Inspect Element in Chrome, Safari, and Firefox